Pierwsze konstrukcje robotów powstawały z klocków Lego dawno temu w dzieciństwie, niestety ich największa wadą była mała mobilność (po prostu sie w ogóle nie ruszały). Teraz już jako (prawie) absolwent kierunku Automatyka I Robotyka postanowiłem popełnić bardzo prosta konstrukcje, dzięki której zyskałem sporo doświadczenia.
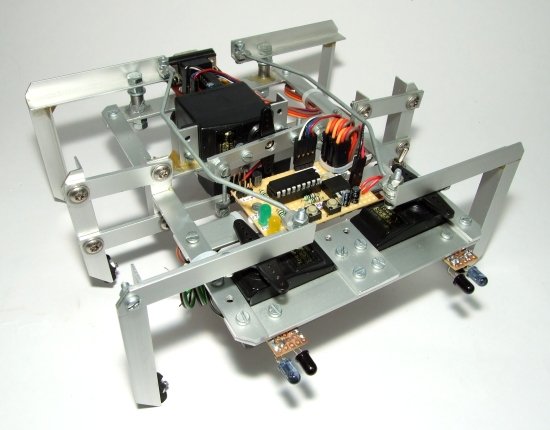 k2R-001m to sześcio nożny mobilny robot kroczący. Jako napęd służą trzy serwa modelarskie, co oznacza ze jeden napęd porusza dwie kończyny. Uproszczenie to w znacznym stopniu ogranicza mobilność w terenie (ruch tylko po równych powierzchniach) ale znacznie upraszcza konstrukcje jak i sterowanie. Jednostka sterująca to 8 bitowy mikrokontroler PIC16F88 pracujący z częstotliwością 8 Mhz (wydajność 2 MIPS). Program sterujący robotem napisany jest w języku C. Oczami robota będą czujniki odległości na podczerwień, oraz inne (dotykowe, kolorów lub inne). Komunikacja z robotem odbywać sie będzie poprzez złącze rs-232, w dalszej przyszłości USB. Zasilanie 6 ogniw Ni-Mh.
k2R-001m to sześcio nożny mobilny robot kroczący. Jako napęd służą trzy serwa modelarskie, co oznacza ze jeden napęd porusza dwie kończyny. Uproszczenie to w znacznym stopniu ogranicza mobilność w terenie (ruch tylko po równych powierzchniach) ale znacznie upraszcza konstrukcje jak i sterowanie. Jednostka sterująca to 8 bitowy mikrokontroler PIC16F88 pracujący z częstotliwością 8 Mhz (wydajność 2 MIPS). Program sterujący robotem napisany jest w języku C. Oczami robota będą czujniki odległości na podczerwień, oraz inne (dotykowe, kolorów lub inne). Komunikacja z robotem odbywać sie będzie poprzez złącze rs-232, w dalszej przyszłości USB. Zasilanie 6 ogniw Ni-Mh.
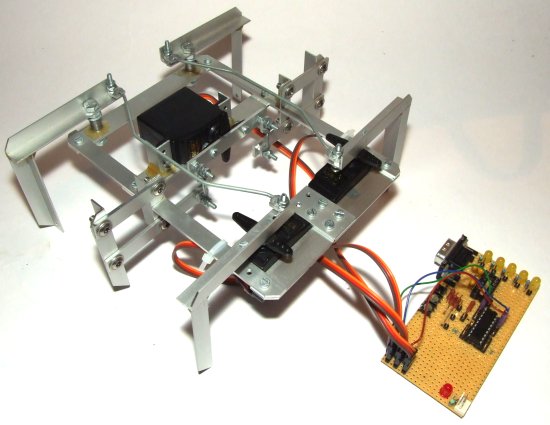
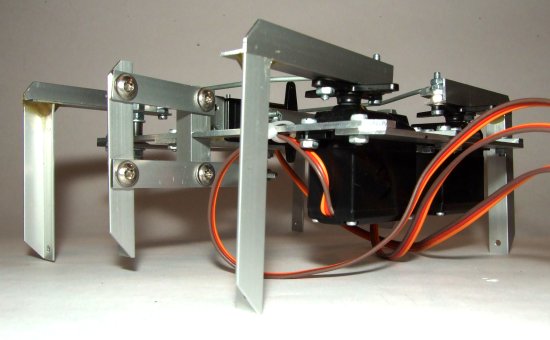
Kolejne fazy konstrukcji robota (na zdjęciu także płytka prototypowa własnej konstrukcji wykorzystywana podczas pisania oprogramowania sterującego).
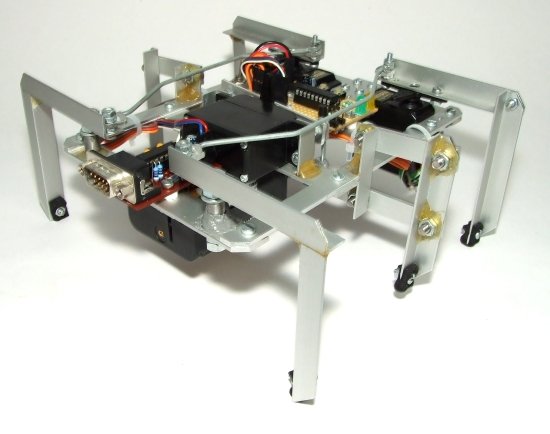
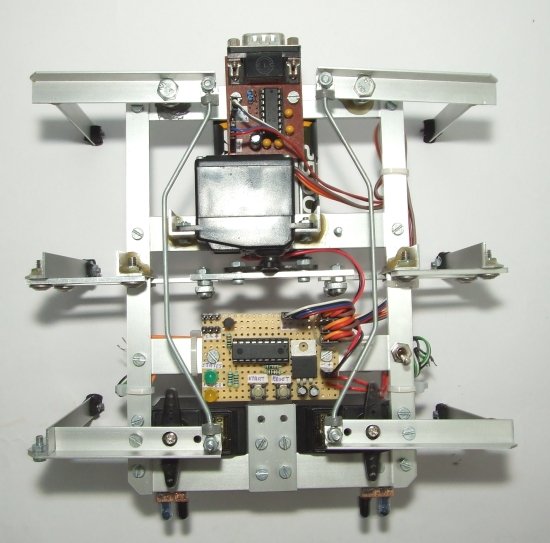
Poniżej robot wyposażony w nowa płytkę z uC oraz czujniki odległości (jeszcze nie podłączone). Z tyłu robota znajduje sie konwerter sygnałów rs232 <-> TTL, a pod nim zasobnik na 6 baterii. Robot porusza sie po zaprogramowanej ścieżce, program przechowywany jest w pamięci EEPROM mikrokontrolera. Ścieżka programowana jest za pomocą złącza rs232 z komputera wyposażonego w port serial.
Pierwsze kroki:
Podstawowe ruchy: